In the previous section, we saw rolling along inclined planes. We saw a solved example also. In this section we will see some solved examples related to rolling motion in general.
Solved example 7.52
A disc rotating about its axis with angular speed $\mathbf\small{|\vec{\omega}_0|}$ is placed lightly (without any translational push) on a perfectly frictionless table. The radius of the disc is R. What are the linear velocities of the points A, B and C on the disc shown in fig. 7.148? Will the disc roll in the direction indicated ?
Solution:
1. Since there is no friction, the disc will not roll. It will only spin
• This is because, there is no external force to cause linear motion
• We have seen the details here.
2. The angular speed will remain the same $\mathbf\small{|\vec{\omega}_0|}$ because, there is no external torque
• When the disc spins with an angular velocity, every point on it will have a certain linear velocity
3. This linear velocity is given by the equation: $\mathbf\small{|\vec{v}|=|\vec{r}|\times|\vec{\omega}|}$
Where
• $\mathbf\small{|\vec{v}|}$ is the linear velocity of the particle
• $\mathbf\small{|\vec{r}|}$ is the distance of the particle from the center
• $\mathbf\small{|\vec{\omega}|}$ is the angular velocity with which the object rotates about the axis passing through the center
4. So in our present case, we have:
$\mathbf\small{|\vec{v}_A|=R\times|\vec{\omega}_0|}$ (towards right)
$\mathbf\small{|\vec{v}_B|=R\times|\vec{\omega}_0|}$ (towards left)
$\mathbf\small{|\vec{v}_C|=0.5R\times|\vec{\omega}_0|}$ (towards right)
Solved example 7.53
Explain why friction is necessary to make the disc in fig.7.148 roll in the direction indicated
(a) Give the direction of frictional force at B, and the sense of frictional torque, before perfect rolling
begins
(b) What is the force of friction after perfect rolling begins
Solution:
• If there is no friction, the disc will not roll. It will only spin.
• This is because, there is no external force to cause linear motion
• We have seen the details here
Part (a):
1. The angular velocity is shown in the clockwise direction
• So the disc will move towards the right
2. Initially there is no perfect rolling. There will be slipping
• The friction will be kinetic in nature
• So the direction of the frictional force will be opposite to the direction of motion. That is., towards the left
3. So before perfect rolling, the frictional torque will be acting in the clockwise direction
Part (b):
1. This is a self propagating disc
• Once the perfect rolling begins, the point of contact with the ground will be at rest
2. An external force of friction will come into play only if the disc tries to accelerate
• Since our disc is not accelerating, the frictional force will be zero
Solved example 7.54
A solid cylinder rolls up an inclined plane of angle of inclination 30°. At the bottom of the inclined plane the centre of mass of the cylinder has a speed of 5 m/s.
(a) How far will the cylinder go up the plane?
(b) How long will it take to return to the bottom?
Solution:
1. At the bottom of the inclined plane, the potential energy is zero
2. Calculation of kinetic energy at bottom:
(i) Rotational kinetic energy
= $\mathbf\small{\frac{1}{2}I\,|\vec{\omega}|^2=\frac{1}{2}\left(\frac{m\,R^2}{2}\right)\left(\frac{|\vec{v}_{CM}|}{R}\right)^2=\frac{m|\vec{v}_{CM}|^2}{4}}$
• Note that for a solid cylinder, $\mathbf\small{I=\frac{m\,R^2}{2}}$
(ii) Translational kinetic energy = $\mathbf\small{\frac{1}{2}m\,|\vec{v}_{CM}|^2}$
(iii) So total kinetic energy = $\mathbf\small{\frac{m|\vec{v}_{CM}|^2}{4}+\frac{m|\vec{v}_{CM}|^2}{2}=\frac{3m|\vec{v}_{CM}|^2}{4}}$
3. Let the cylinder roll up to a height of 'h' m
• Then the potential energy at that height = mgh
4. Equating the two energies, we get: $\mathbf\small{mgh=\frac{3m|\vec{v}_{CM}|^2}{4}}$
$\mathbf\small{\Rightarrow h=\frac{3|\vec{v}_{CM}|^2}{4g}}$
• Substituting the values, we get: $\mathbf\small{\Rightarrow h=\frac{3(5)^2}{4(9.8)}=1.913\,\rm{m}}$
5. This 'h = 1.913 m' is the vertical distance. It is shown in fig.7.149 below:
• The sloping distance 's' can be calculated as follows:
$\mathbf\small{\sin \theta = \frac{h}{s}}$
$\mathbf\small{\Rightarrow \sin 30 =0.5= \frac{1.913}{s}}$
• Thus we get s = 1.913⁄0.5 = 3.826 m
Part (b):
1. The cylinder rolls back down from the height 1.913 m
• Since there is conservation of energy, we can write:
The linear velocity with which the center of the cylinder reaches the bottom will be the same 5 ms-1
• So, for this rolling back motion, the final velocity v is 5 ms-1
2. We have to find the acceleration with which this rolling back occurs
• For a disc and also for a solid cylinder, we have:
Eq.7.40: $\mathbf\small{|\vec{a}|= \frac{2|\vec{g}|\sin \theta}{3}}$
(We derived this equation in the previous section)
Substituting the values, we get: $\mathbf\small{|\vec{a}|= \frac{2(9.8)\sin 30}{3}=3.27}$ ms-2
3. The initial velocity of this back ward rolling is zero
• We can use the equation: $\mathbf\small{|\vec{v}|=|\vec{u}|+|\vec{a}|t}$
• Substituting the values, we get: 5 = 0 + 3.27t
⇒ t = 1.53 s
Solved example 7.55
In the fig.7.150 below, a spring is compressed through a distance of 25 cm using a sphere and then the sphere is let go.
(a) What will be the velocity of the center of mass of the sphere when it is at the bottom of the inclined plane ?
(b) What will be the maximum distance traveled by the sphere along the incline ?
Mass of the sphere = 1.5 kg
Radius of the sphere = 8 cm
Spring constant k = 300 N m-1
Solution:
Part (a):
1. When the spring is compressed, 'spring potential energy' is stored up in it
• When the spring is released, the energy becomes available for the sphere
2. Applying law of conservation of energy, we can write:
Potential energy stored in the spring
= Rotational kinetic energy at B + translational kinetic energy at B
= Potential energy at C
3. Potential energy stored in the spring
= $\mathbf\small{\frac{1}{2}kx^2=\frac{1}{2}(300)(0.25)^2=9.375}$ J
4. Rotational kinetic energy at B
= $\mathbf\small{\frac{1}{2}I\,|\vec{\omega}|^2=\frac{1}{2}\left(\frac{2m\,R^2}{5}\right)\left(\frac{|\vec{v}_{CM}|}{R}\right)^2=\frac{m|\vec{v}_{CM}|^2}{5}}$
• Note that for a sphere, $\mathbf\small{I=\frac{2m\,R^2}{5}}$
6. Translational kinetic energy at B
= $\mathbf\small{\frac{1}{2}m\,|\vec{v}_{CM}|^2}$
7. So we get:
Rotational kinetic energy at B + translational kinetic energy at B
= $\mathbf\small{\frac{m|\vec{v}_{CM}|^2}{5}+\frac{m|\vec{v}_{CM}|^2}{2}=\frac{7m|\vec{v}_{CM}|^2}{10}}$
Substituting the values, we get:
$\mathbf\small{\frac{7m|\vec{v}_{CM}|^2}{10}=\frac{7(1.5)|\vec{v}_{CM}|^2}{10}=1.05|\vec{v}_{CM}|^2}$
8. Equating this to the result in (3), we get: $\mathbf\small{1.05|\vec{v}_{CM}|^2=9.375}$
$\mathbf\small{\Rightarrow|\vec{v}_{CM}|=2.99}$ ms-1
Part (b):
1. From (2) in part (a), we have:
Potential energy stored in the spring = Potential energy at C
2. From (3) in part (a), we have:
Potential energy stored in the spring = 9.375 J
3. Potential energy at C
= mgh = (1.5)(9.8)(h) = 14.7 h J
4. Equating the results in (2) and (3), we get: 9.375 = 14.7 h
h = 0.638 m
5. So s = 0.638⁄sin 30 = 1.276 m
Solved example 7.56
A string is wound around a solid cylinder. The free end of the string is attached firmly to the ceiling as shown in fig.7.151 below. The cylinder is let go from a height of h from the ground. What will be the velocity of the CM of the cylinder when it just reaches the ground ?
Solution:
1. Applying law of conservation of energy, we can write:
Potential energy of the cylinder at height h
= Rotational kinetic energy of cylinder at ground + translational kinetic energy of cylinder at ground
2. Potential energy of the cylinder when it is at a height h = mgh
3. Rotational kinetic energy at ground
= $\mathbf\small{\frac{1}{2}I\,|\vec{\omega}|^2=\frac{1}{2}\left(\frac{m\,R^2}{2}\right)\left(\frac{|\vec{v}_{CM}|}{R}\right)^2=\frac{m|\vec{v}_{CM}|^2}{4}}$
• Note that for a solid cylinder, $\mathbf\small{I=\frac{m\,R^2}{2}}$
4. Translational kinetic energy at B
= $\mathbf\small{\frac{1}{2}m\,|\vec{v}_{CM}|^2}$
5. So we get:
Rotational kinetic energy at B + translational kinetic energy at B
= $\mathbf\small{\frac{m|\vec{v}_{CM}|^2}{4}+\frac{m|\vec{v}_{CM}|^2}{2}=\frac{3m|\vec{v}_{CM}|^2}{4}}$
6. Equating the energies, we get: $\mathbf\small{mgh=\frac{3m|\vec{v}_{CM}|^2}{4}}$
$\mathbf\small{\Rightarrow|\vec{v}_{CM}|=\sqrt{\frac{4gh}{3}}}$
Solved example 7.52
A disc rotating about its axis with angular speed $\mathbf\small{|\vec{\omega}_0|}$ is placed lightly (without any translational push) on a perfectly frictionless table. The radius of the disc is R. What are the linear velocities of the points A, B and C on the disc shown in fig. 7.148? Will the disc roll in the direction indicated ?
 |
| Fig.7.148 |
1. Since there is no friction, the disc will not roll. It will only spin
• This is because, there is no external force to cause linear motion
• We have seen the details here.
2. The angular speed will remain the same $\mathbf\small{|\vec{\omega}_0|}$ because, there is no external torque
• When the disc spins with an angular velocity, every point on it will have a certain linear velocity
3. This linear velocity is given by the equation: $\mathbf\small{|\vec{v}|=|\vec{r}|\times|\vec{\omega}|}$
Where
• $\mathbf\small{|\vec{v}|}$ is the linear velocity of the particle
• $\mathbf\small{|\vec{r}|}$ is the distance of the particle from the center
• $\mathbf\small{|\vec{\omega}|}$ is the angular velocity with which the object rotates about the axis passing through the center
4. So in our present case, we have:
$\mathbf\small{|\vec{v}_A|=R\times|\vec{\omega}_0|}$ (towards right)
$\mathbf\small{|\vec{v}_B|=R\times|\vec{\omega}_0|}$ (towards left)
$\mathbf\small{|\vec{v}_C|=0.5R\times|\vec{\omega}_0|}$ (towards right)
Solved example 7.53
Explain why friction is necessary to make the disc in fig.7.148 roll in the direction indicated
(a) Give the direction of frictional force at B, and the sense of frictional torque, before perfect rolling
begins
(b) What is the force of friction after perfect rolling begins
Solution:
• If there is no friction, the disc will not roll. It will only spin.
• This is because, there is no external force to cause linear motion
• We have seen the details here
Part (a):
1. The angular velocity is shown in the clockwise direction
• So the disc will move towards the right
2. Initially there is no perfect rolling. There will be slipping
• The friction will be kinetic in nature
• So the direction of the frictional force will be opposite to the direction of motion. That is., towards the left
3. So before perfect rolling, the frictional torque will be acting in the clockwise direction
Part (b):
1. This is a self propagating disc
• Once the perfect rolling begins, the point of contact with the ground will be at rest
2. An external force of friction will come into play only if the disc tries to accelerate
• Since our disc is not accelerating, the frictional force will be zero
Solved example 7.54
A solid cylinder rolls up an inclined plane of angle of inclination 30°. At the bottom of the inclined plane the centre of mass of the cylinder has a speed of 5 m/s.
(a) How far will the cylinder go up the plane?
(b) How long will it take to return to the bottom?
Solution:
1. At the bottom of the inclined plane, the potential energy is zero
2. Calculation of kinetic energy at bottom:
(i) Rotational kinetic energy
= $\mathbf\small{\frac{1}{2}I\,|\vec{\omega}|^2=\frac{1}{2}\left(\frac{m\,R^2}{2}\right)\left(\frac{|\vec{v}_{CM}|}{R}\right)^2=\frac{m|\vec{v}_{CM}|^2}{4}}$
• Note that for a solid cylinder, $\mathbf\small{I=\frac{m\,R^2}{2}}$
(ii) Translational kinetic energy = $\mathbf\small{\frac{1}{2}m\,|\vec{v}_{CM}|^2}$
(iii) So total kinetic energy = $\mathbf\small{\frac{m|\vec{v}_{CM}|^2}{4}+\frac{m|\vec{v}_{CM}|^2}{2}=\frac{3m|\vec{v}_{CM}|^2}{4}}$
3. Let the cylinder roll up to a height of 'h' m
• Then the potential energy at that height = mgh
4. Equating the two energies, we get: $\mathbf\small{mgh=\frac{3m|\vec{v}_{CM}|^2}{4}}$
$\mathbf\small{\Rightarrow h=\frac{3|\vec{v}_{CM}|^2}{4g}}$
• Substituting the values, we get: $\mathbf\small{\Rightarrow h=\frac{3(5)^2}{4(9.8)}=1.913\,\rm{m}}$
5. This 'h = 1.913 m' is the vertical distance. It is shown in fig.7.149 below:
 |
| Fig.7.149 |
$\mathbf\small{\sin \theta = \frac{h}{s}}$
$\mathbf\small{\Rightarrow \sin 30 =0.5= \frac{1.913}{s}}$
• Thus we get s = 1.913⁄0.5 = 3.826 m
Part (b):
1. The cylinder rolls back down from the height 1.913 m
• Since there is conservation of energy, we can write:
The linear velocity with which the center of the cylinder reaches the bottom will be the same 5 ms-1
• So, for this rolling back motion, the final velocity v is 5 ms-1
2. We have to find the acceleration with which this rolling back occurs
• For a disc and also for a solid cylinder, we have:
Eq.7.40: $\mathbf\small{|\vec{a}|= \frac{2|\vec{g}|\sin \theta}{3}}$
(We derived this equation in the previous section)
Substituting the values, we get: $\mathbf\small{|\vec{a}|= \frac{2(9.8)\sin 30}{3}=3.27}$ ms-2
3. The initial velocity of this back ward rolling is zero
• We can use the equation: $\mathbf\small{|\vec{v}|=|\vec{u}|+|\vec{a}|t}$
• Substituting the values, we get: 5 = 0 + 3.27t
⇒ t = 1.53 s
Solved example 7.55
In the fig.7.150 below, a spring is compressed through a distance of 25 cm using a sphere and then the sphere is let go.
 |
| Fig.7.150 |
(b) What will be the maximum distance traveled by the sphere along the incline ?
Mass of the sphere = 1.5 kg
Radius of the sphere = 8 cm
Spring constant k = 300 N m-1
Solution:
Part (a):
1. When the spring is compressed, 'spring potential energy' is stored up in it
• When the spring is released, the energy becomes available for the sphere
2. Applying law of conservation of energy, we can write:
Potential energy stored in the spring
= Rotational kinetic energy at B + translational kinetic energy at B
= Potential energy at C
3. Potential energy stored in the spring
= $\mathbf\small{\frac{1}{2}kx^2=\frac{1}{2}(300)(0.25)^2=9.375}$ J
4. Rotational kinetic energy at B
= $\mathbf\small{\frac{1}{2}I\,|\vec{\omega}|^2=\frac{1}{2}\left(\frac{2m\,R^2}{5}\right)\left(\frac{|\vec{v}_{CM}|}{R}\right)^2=\frac{m|\vec{v}_{CM}|^2}{5}}$
• Note that for a sphere, $\mathbf\small{I=\frac{2m\,R^2}{5}}$
6. Translational kinetic energy at B
= $\mathbf\small{\frac{1}{2}m\,|\vec{v}_{CM}|^2}$
7. So we get:
Rotational kinetic energy at B + translational kinetic energy at B
= $\mathbf\small{\frac{m|\vec{v}_{CM}|^2}{5}+\frac{m|\vec{v}_{CM}|^2}{2}=\frac{7m|\vec{v}_{CM}|^2}{10}}$
Substituting the values, we get:
$\mathbf\small{\frac{7m|\vec{v}_{CM}|^2}{10}=\frac{7(1.5)|\vec{v}_{CM}|^2}{10}=1.05|\vec{v}_{CM}|^2}$
8. Equating this to the result in (3), we get: $\mathbf\small{1.05|\vec{v}_{CM}|^2=9.375}$
$\mathbf\small{\Rightarrow|\vec{v}_{CM}|=2.99}$ ms-1
Part (b):
1. From (2) in part (a), we have:
Potential energy stored in the spring = Potential energy at C
2. From (3) in part (a), we have:
Potential energy stored in the spring = 9.375 J
3. Potential energy at C
= mgh = (1.5)(9.8)(h) = 14.7 h J
4. Equating the results in (2) and (3), we get: 9.375 = 14.7 h
h = 0.638 m
5. So s = 0.638⁄sin 30 = 1.276 m
Solved example 7.56
A string is wound around a solid cylinder. The free end of the string is attached firmly to the ceiling as shown in fig.7.151 below. The cylinder is let go from a height of h from the ground. What will be the velocity of the CM of the cylinder when it just reaches the ground ?
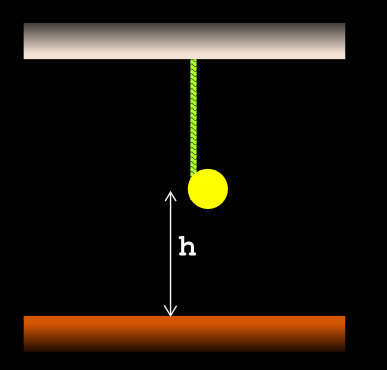 |
| Fig.7.151 |
1. Applying law of conservation of energy, we can write:
Potential energy of the cylinder at height h
= Rotational kinetic energy of cylinder at ground + translational kinetic energy of cylinder at ground
2. Potential energy of the cylinder when it is at a height h = mgh
3. Rotational kinetic energy at ground
= $\mathbf\small{\frac{1}{2}I\,|\vec{\omega}|^2=\frac{1}{2}\left(\frac{m\,R^2}{2}\right)\left(\frac{|\vec{v}_{CM}|}{R}\right)^2=\frac{m|\vec{v}_{CM}|^2}{4}}$
• Note that for a solid cylinder, $\mathbf\small{I=\frac{m\,R^2}{2}}$
4. Translational kinetic energy at B
= $\mathbf\small{\frac{1}{2}m\,|\vec{v}_{CM}|^2}$
5. So we get:
Rotational kinetic energy at B + translational kinetic energy at B
= $\mathbf\small{\frac{m|\vec{v}_{CM}|^2}{4}+\frac{m|\vec{v}_{CM}|^2}{2}=\frac{3m|\vec{v}_{CM}|^2}{4}}$
6. Equating the energies, we get: $\mathbf\small{mgh=\frac{3m|\vec{v}_{CM}|^2}{4}}$
$\mathbf\small{\Rightarrow|\vec{v}_{CM}|=\sqrt{\frac{4gh}{3}}}$
We have completed a discussion on rotational motion. In the next chapter, we will see gravitation
